RID Base
Base Information
The RID’s base consists of
- Motors
- Frame
- Batteries
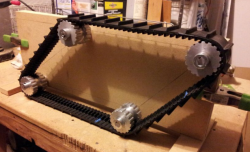
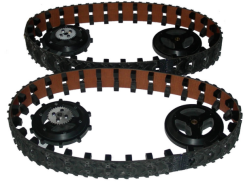
- Track System
Driving the track system are right and left 24 volt Invacare Storm 4500RPM electric motors. The motors will be driven by a Sabertooth 2×60 regenerative motor controller from Dimension Engineering.


The final frame design will be constructed from 6061 aluminum. It will have an overall foot print of 28” (L) x 18” (W) x 10” (H).
Powering the entire system are two Werker 12 volt 20 amp-hour deep cycle batteries. A power distribution block and/ or buck converters will be used to distribute power to lower voltage sub-systems such as servos, microcontrollers, and wireless video equipment.
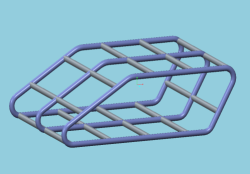
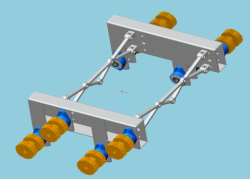
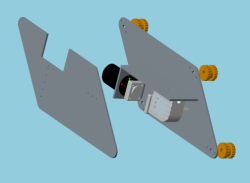
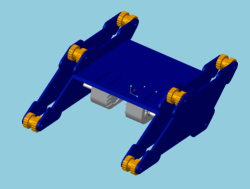
The track system is a work in progress. The team is near a final decision on which way to go with this. Shown below is the team’s first attempt at a track system and some alternatives.


About The ME Student

Fabian Saldana
A born tinkerer, Fabian’s interests in building things began with a couple of semesters of high school woodshop. There he developed fundamental skills that are still in use today for building model bridges, tables, book cases, and prototypes for school projects. “Thanks Tibor!” An interest in all things mechanical came with the purchase of a broken-down 1974 Datsun 260z. “This car was my first successful attempt at repairing and modifying a mechanical system. With the exception of body work, I’ve made any and all repairs on my vehicles ever since.” An aptitude for computers was further developed while working as a computer tech for the Robert E. Swenson Library at Cabrillo College; he currently works as a media services/ computer tech for the Dr. Martin Luther King Jr. Library at San Jose State University. He transferred to San Jose State University in the fall of 2010 and is scheduled to complete his undergraduate work in Mechanical Engineering at the end of the Spring 2013 semester; his focus is in Mechatronics.
Experience with:
- CAD Pro Engineer 4.0/ Creo 2.0
- Matlab/ Simulink
- LabView
- General Electronics
- C/ C++ programming
- Arduino Microcontrollers
- Electronic Actuators